ASIMOV Robotics Pvt. Ltd, Kochi

Projects at Asimov Robotics
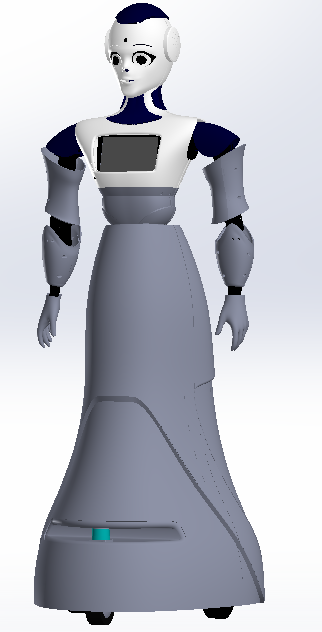
The task was to develop a service robot as shown in the above figure. The hardware was built by using Dynamixel servos, Hokuyo laser, and Intel-NUC. The software was architectured using ROS smach. Users can interact with the robot through the screen at the front and based upon the user query, the robot would do a particular task. The task consists of some gestures and navigation. Gestures were performed by simple record and playback, while navigation was done using amcl package. During my six month stay, the various tasks I did are:
- Gravity compensation for assistive mode (didn’t work well, was oscillating a lot..!).
- Position and Velocity control of DC motor as a replacement for dynamixel servos in the base.
- TCP/IP communication between ROS and non-ROS module.
- To perform basic motion planning simulation in Gazebo using ROS and MoveIt.
- Sensor Integration
- IMU sensor with ROS for Navigation.
- Tactile sensor(FSR) for Human-Robot Interaction.
- Ultrasonic sensor with ROS for Obstacle avoidance.
It wasn’t a huge company. But being in a hardware start-up taught me more than I could ever possibly imagine. I was fortunate to get my hands around hardware and was able to see how real products were being built and how they approached a real-world problem. Most importantly my coding and debugging skills improved a lot, thanks to my mentors Gokul Narayanan and Rajashekaran T and also would like to thank Jayakrishnan T(CEO) and Anto John(CMO) for giving me a wonderful opportunity in ASIMOV Robotics Pvt. Ltd, Kochi.